基于**声波检测的倒车雷达设计
- 2015-01-24 15:24
- 7933
- 资讯文章
- admin
- 来源:本站

|
倒车雷达(Car Reversing Aid Systems)的全称是“倒车防撞雷达”,也称“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。 系统工作原理 倒车雷达只需要在汽车倒车时工作,为驾驶员提供汽车后方的信息。由于倒车时汽车的行驶速度较慢,和声速相比可以认为汽车是静止的,因此在系统中可以忽略多普勒效应的影响。在许多测距方法中,脉冲测距法只需要测量**声波在测量点与目标间的往返时间,实现简单,因此本系统采用了这种方法。 如图1所示,驾驶员将手柄转到倒车档后,系统自动启动,**声波发送模块向后发射40kHz的**声波信号,经障碍物反射,由**声波接收模块收集,进行放大和比较,单片机AT89C2051将此信号送入显示模块,同时触发语音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m 时,发出不同的报警声,提醒驾驶员停车。
图1 系统工作原理框图
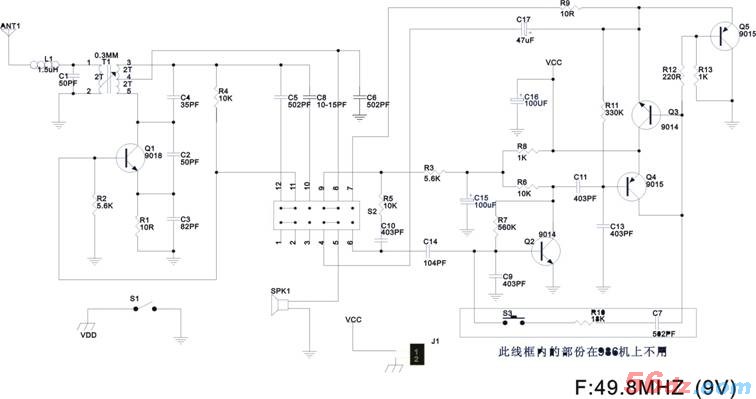
图2 **声波发送模块电路 [NextPage] 硬件设计 1 **声波发送模块设计 **声波发送器包括**声波产生电路和**声波发射控制电路两个部分,**声波探头(又称“**声波换能器”)选用CSB40T,可采用软件发生法和硬件发生法产生**声波。前者利用软件产生40kHz的**声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生**声波。这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。第二种方法是利用**声波专用发生电路或通用发生电路产生**声波信号,并直接驱动换能器产生**声波。这种方法的优点是无须驱动电路,但缺乏灵活性。 本设计采用第一种方法产生**声波,电路设计如图2所示。40kHz的**声波是利用555时基电路振荡产生的。其振荡频率计算式为f=1.43/((R 9+2·R 10)·C 5)。将R 10设计为可调电阻的目的是为了调节信号频率,使之与换能器的40kHz固有频率一致。为**555时基具有足够的驱动能力,宜采用+12V电源。CNT为**声波发射控制信号,由单片机进行控制。
图3 **声波接收模块电路 2 **声波接收模块设计 **声波接收器包括**声波接收探头、信号放大电路及波形变换电路三部分。**声波探头**采用与发射探头对应的型号,关键是频率要一致,本设计采用 CSB40R,否则将因无法产生共振而影响接收效果,甚至无法接收。由于经探头变换后的正弦波电信号非常弱,因此**经放大电路放大。正弦波信号不能直接被单片机接收,**进行波形变换。按照上面所讨论的原理,单片机需要的只是第一个回波的时刻。接收电路的设计可采用专用接收电路,也可采用通用电路来实现,如图3所示。 **声波在空气中传播时,其能量的衰减与距离成正比,即距离越近信号越强,距离越远信号越弱,通常在1mV~1V之间。当然,不同接收探头的输出信号强度存在差异。由于输入信号的范围较大,对放大电路的增益提出了两个要求:一是放大增益要大,以适应小信号时的需要;二是放大增益要能变化,以适应信号变化范围大的需要。另外,由于输入信号为正弦波,因此**将放大电路设计成交流放大电路。为减少负电源的使用,放大电路采用单电源供电,信号放大和变换采用了一片LM324通用运算放大器,前三级为放大器设计,后一级为比较器设计。LM324既可以双电源工作,也可以单电源工作,因此能满足使用要求。为满足交流信号的需要,每一级的放大器均采用阻容电路进行电平偏移,即图3中的C7、C21、C22和C24,容量均为10μF,实现单电源条件下交流信号的放大。对于交流信号而言,电容为短路,因此前三级放大电路的增益均为10。距离较近时,两级放大的增益已能够输出足够强度的信号了,第三级有可能出现信号饱和,但距离较远时,**采用三级放大。合理调节电位器R27,选择比较基准电压,可使测量更加准确和稳定。
图4 语音电路 [NextPage] 3 语音电路设计 语音报警是指当倒车雷达探测到的距离小于所设定的安全值时,发出声音提醒驾驶员,语音电路设计如图4所示。M3720是单声一闪灯报警音效集成电路,芯片内存储一种报警音效,可直接驱动蜂鸣器发声或经外接功放三极管推动扬声器放音,同时还能驱动一只LED闪烁。该芯片各引脚功能为:5脚VDD; 1脚VSS分别为电源输入端与负端,VDD电压3~3.5V;8脚X和1脚Y分别为芯片外接振荡电阻器;6脚TG为触发控制端,低电平触发有效;3脚BZ 和2脚BB分别为报警音效输出端,可直接外接压电陶瓷蜂鸣器,如果驱动扬声器则由3脚BZ端引出;4脚L为闪灯输出端,可直接驱动LED发光。 软件设计 AT89C2051单片机及其开发应用系统具有语言简洁、可移植性好、表达能力强、可进行结构化设计、可以直接控制计算机硬件、生成代码质量高、使用方便等诸多优点。该系统的主程序处于键控循环工作方式,当手柄转入倒车档,主程序开始调用测量子程序、显示子程序和语音提示子程序,完成整个检测提示过程,如图5所示。 结束语 本文所设计的倒车雷达系统是**汽车倒车安全的辅助系统,通过**声波探头发出**声波,使用高速单片机计算距离,并加入了温度补偿电路,提高了距离计算的精度。系统安装的液晶显示器可以直观的显示温度和距离,给驾驶员提供了方便。倒车时当汽车与障碍物的距离小于我们所设定的安全距离时,系统便通过语音集成电路发出报警,提醒驾驶员,防止汽车的碰撞或擦伤,具有很强的实用性。 |
|